小米机器人模型Xiaomi-Robotics-0升级:真机后训练实现高精度收纳
今年2月,小米机器人团队推出了全新具身智能VLA模型Xiaomi-Robotics-0,并进行了开源。该模型自发布以来便受到广泛关注,首月即在全球HuggingFace VLA模型下载榜单中位列第六。
为进一步提升模型的实用性和“开箱即用”的生产力,小米技术近日宣布,正式发布Xiaomi-Robotics-0的真机后训练(Post-training)全流程,并公开了最新的能力演示。这一进展标志着该模型在实际应用中的能力得到了显著增强。
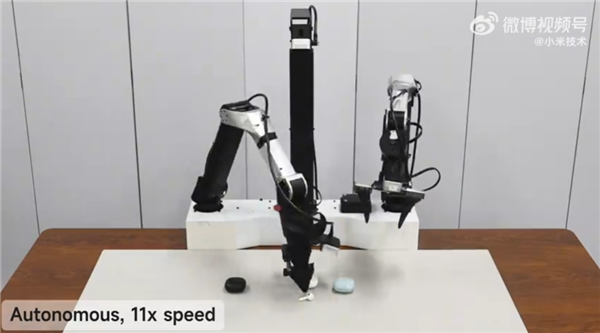
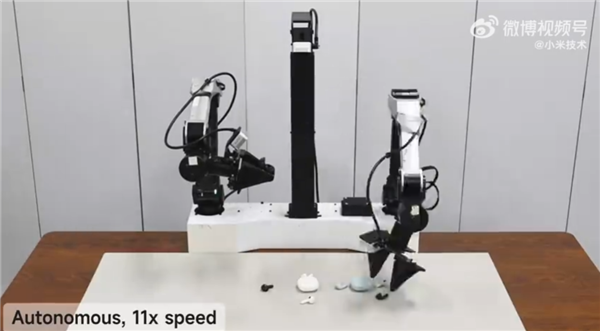
通过在预训练基座模型上,仅使用20小时的任务数据进行真机后训练,Xiaomi-Robotics-0成功掌握了“将耳机收纳进耳机盒”这一复杂操作。尤为值得注意的是,模型能够流畅且连续地完成多个耳机的收纳任务,展现出色的精细操作能力。
小米方面指出,完成这一高难度动作主要面临两大核心挑战:
- 耳机与耳机盒槽位之间的公差极小,要求模型具备亚毫米级的空间感知精度,才能实现精准对位。
- 耳机与盒体表面粗糙度可低至Ra0.03μm,在触碰过程中极易发生位移,模型需要能够快速修正动作偏差,以避免装配失败。
为了实现机器人动作的无缝衔接,小米在部署阶段采用了异步推理方案。这意味着在执行当前动作轨迹的同时,系统会同步推理下一步动作,大大缩短了响应时间,提升了整体操作效率。
此外,为了避免前后两次推理产生的动作突然变化,小米在训练过程中引入了动作前缀机制。这一机制被形象地比喻为接力赛中的“助跑区”,它能够让新动作从既有轨迹中自然地“生长”出来,从而实现动作流的平滑过渡和切换,最终达到更流畅、更连贯的操作效果。
此次小米对Xiaomi-Robotics-0模型进行真机后训练全流程的发布,以及其在耳机收纳任务中展现出的高精度和流畅性,无疑为具身智能机器人的发展注入了新的活力。模型通过优化训练数据和引入创新的推理机制,有效解决了现实世界中机器人操作的复杂性挑战,预示着机器人更广泛、更深入地融入生产和生活场景的可能性正在逐步提升。